DRV DRX 在钛合金/超合金等温锻造中的作用
本文面向热变形、锻造与组织控制场景,系统总结动态回复(DRV)与动态再结晶(DRX)的机理差异、显微组织判据及其在钛合金与超合金等温锻造中的贡献。文中的插图为基于公开文献信息的示意图,便于在个人博客中直接使用;具体事实判断与工程结论均附参考文献。
1. 为什么在热变形里一定要理解 DRV / DRX?
对于钛合金、镍基超合金这类高温强度高、导热差、成形窗口窄的材料来说,热变形过程中最核心的问题并不是“它能不能变形”,而是:
- 流动应力会不会持续升高,导致载荷过大;
- 组织会不会在局部失稳,导致裂纹、折叠或组织粗细不均;
- 最终能否得到细小、均匀、可控的显微组织。
而这些问题的背后,本质上都与动态软化机制有关。高温塑性变形中最常讨论的两类动态软化机制就是:
- DRV(Dynamic Recovery,动态回复)
- DRX(Dynamic Recrystallization,动态再结晶)
可以先记住一句最重要的话:
DRV 更像“缓解加工硬化”,DRX 更像“重建显微组织”。
也就是说,DRV 主要通过位错重排、攀移和湮灭来降低内应力;而 DRX 则通过形成新的低位错晶粒,真正把高畸变组织“重置”成新的组织状态。近 β 钛合金 Ti-55511 的两道次热压缩研究表明,随着第一道次变形温度由 700 °C 升高到 850 °C,主导恢复机制会由 DRX 转向 DRV,这正说明两者并不是孤立存在,而是在不同工艺条件下竞争主导地位[^wang2021]。镍基超合金 GH4151 和 Haynes 282 的研究也显示,不同应变、应变速率、保温时间下,DRX、DRV 及后续的亚动态再结晶(mDRX)会共同决定最终组织[^lv2020][^eriksson2023]。
2. DRV 的机理:它如何“吃掉”加工硬化?
2.1 加工硬化为什么会发生?
金属在塑性变形时,会不断产生并积累位错。位错越多,彼此缠结越严重,继续变形就越困难,于是材料的流动应力不断升高,这就是加工硬化。
如果没有软化机制介入,流动应力会持续上升,最终容易引发:
- 载荷过高;
- 局部应变集中;
- 晶界处损伤累积;
- 成形失稳甚至开裂。
2.2 DRV 的本质是什么?
**动态回复(DRV)**发生在高温变形过程中,本质上是位错在热激活作用下发生:
- 重排(rearrangement)
- 攀移(climb)
- 交滑移(cross-slip)
- 湮灭(annihilation)
结果是:材料内部虽然仍在变形,但位错密度不再无限制累积,而是被持续“消解”一部分,于是加工硬化速度下降,流动应力开始趋于平台。
更微观地看,DRV 的结果往往是形成:
- 位错胞(dislocation cells)
- 亚晶(subgrains)
- 低角度晶界(LAGB, low-angle grain boundaries)
这意味着,DRV 并不会立刻生成大量新的等轴晶粒,而是先把高位错组织整理成更有序的亚结构。钛合金热变形综述指出,在 β 单相区 中,β 晶内常见的主导软化机制正是 DRV;而真正的不连续动态再结晶(DDRX)往往更多出现在晶界附近[^furuhara2007]。
2.3 DRV 在流动曲线上的典型表现
DRV 主导时,流动应力曲线通常表现为:
- 初期仍然上升(加工硬化存在);
- 随着应变增加,上升速率减慢;
- 最后趋于平台,或仅有轻微软化。
下面这张图可以帮助直观理解:
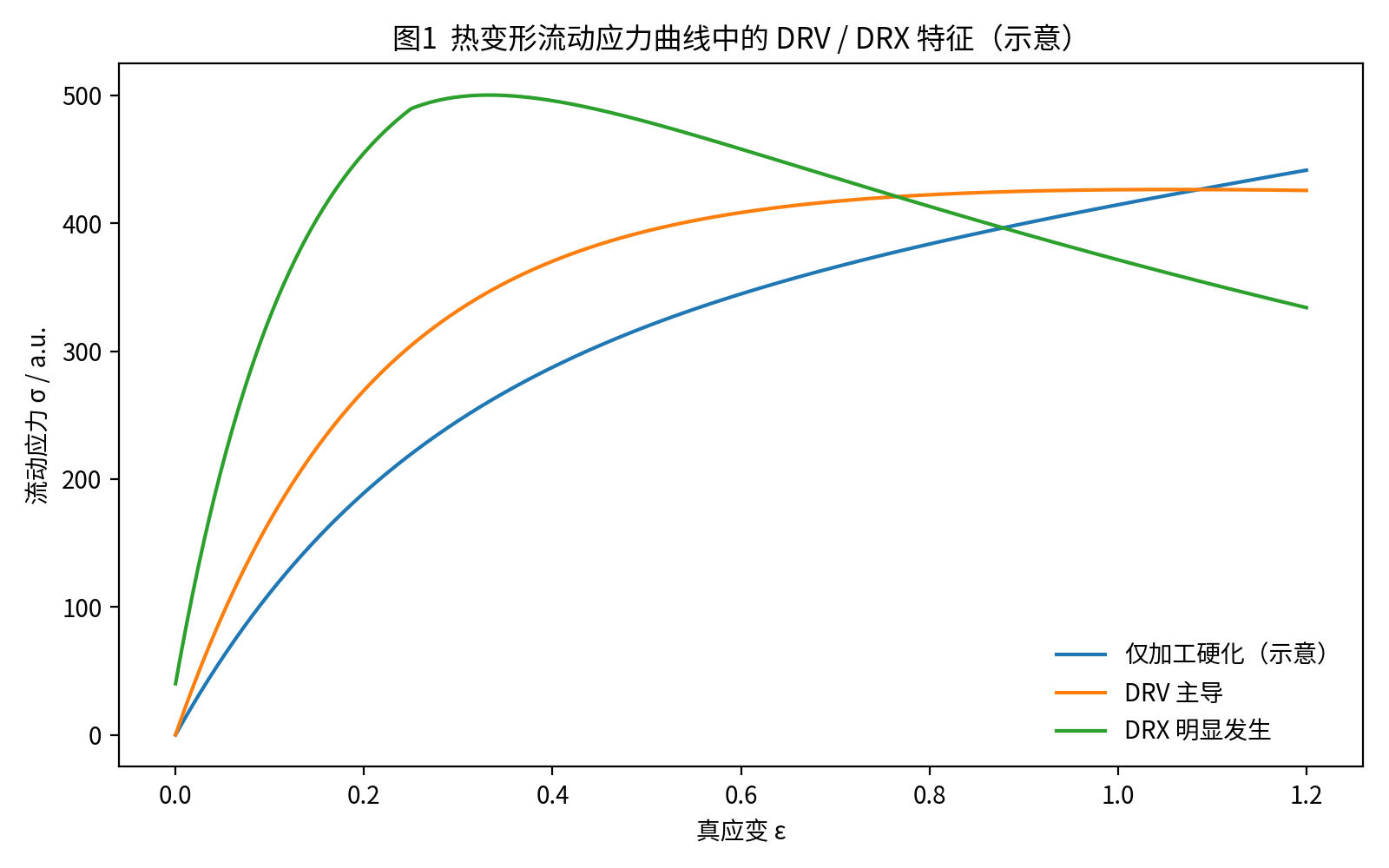
图1说明:
- 如果只有加工硬化,曲线会持续上升;
- 如果 DRV 主导,曲线会上升后逐渐平台化;
- 如果 DRX 显著发生,则往往会先达到峰值,然后出现更明显的软化。
因此,仅从应力—应变曲线本身,往往可以初步判断材料在该温度和应变速率下更接近“回复主导”还是“再结晶主导”。
3. DRX 的机理:它如何“重建”晶粒?
3.1 DRX 的驱动力来自哪里?
DRX 的驱动力来自于变形储存能。
当材料经历大量塑性变形后,内部会积累很高的位错密度,这种高位错状态意味着高储存能。为了降低系统自由能,材料会倾向于通过形成新生的低位错晶粒来释放这部分储存能,这就是动态再结晶。
相较于 DRV 主要“整理位错”,DRX 的本质更接近于:
把原有高畸变晶粒局部甚至整体替换成新的低畸变晶粒。
因此,DRX 对于晶粒细化、组织均匀化以及热加工塑性的改善,通常比 DRV 更直接。
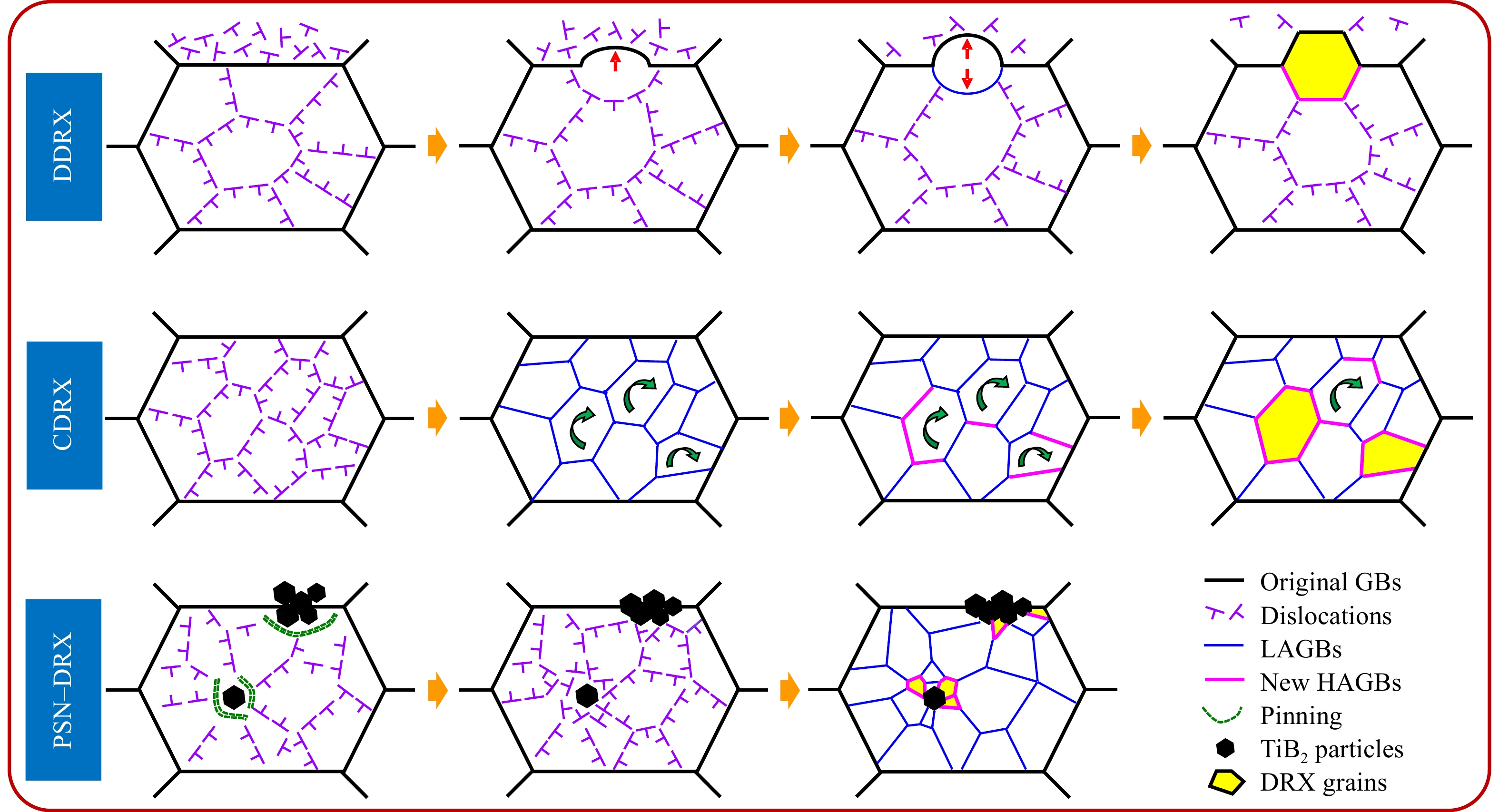
3.2 DRX 常见的两种模式:DDRX 与 CDRX
3.2.1 DDRX:不连续动态再结晶
DDRX(Discontinuous Dynamic Recrystallization)最典型的特征是:
- 晶界鼓出(grain boundary bulging)
- 新晶粒优先在原始高角度晶界、三重点等位置萌生
- 新生晶粒逐步长大,吞并周围高畸变区域
这种机制在很多镍基超合金中非常典型。GH4151 的研究显示,在其亚固溶温度热变形中,DDRX 是主导的再结晶机制,同时还伴随连续动态再结晶(CDRX)与一种特殊的异质外延型动态再结晶(HDRX)[^lv2020]。
3.2.2 CDRX:连续动态再结晶
CDRX(Continuous Dynamic Recrystallization)不是一下子从旧晶粒边界鼓出一个新晶粒,而是:
- 先由 DRV 形成大量亚晶和低角度晶界;
- 随着继续变形,这些低角度晶界不断吸收位错;
- 晶界两侧取向差逐步增大;
- 最终由 LAGB 演化为高角度晶界(HAGB);
- 于是原来的亚晶演化成真正意义上的“再结晶晶粒”。
所以从机理上看:
DRV 往往是 CDRX 的前奏。
3.3 DRV、DDRX、CDRX 的差别
- DRV 的核心是位错重排与亚晶形成,重点在“降低位错密度”,而不是直接产生新晶粒;
- DDRX 的核心是旧晶界鼓出并形核出新的等轴晶粒;
- CDRX 的核心是亚晶边界不断吸收位错、逐渐增大取向差,最终连续演化为新晶粒。
- sub-grain、位错累积、亚晶界演化
- 晶界鼓出、DDRX / CDRX
工程上真正困难的地方在于:实际锻造中三者常常同时存在,只是主导程度不同。
4. 怎样从显微组织判断 DRV / DRX?
热变形组织分析时,可以用以下顺序来判断:
4.1 先看位错与取向梯度
如果 EBSD 的 KAM(Kernel Average Misorientation)值整体偏高,通常说明:
- 局部取向梯度大;
- 位错密度高;
- 储存能较高;
- DRX 具有潜在驱动力。
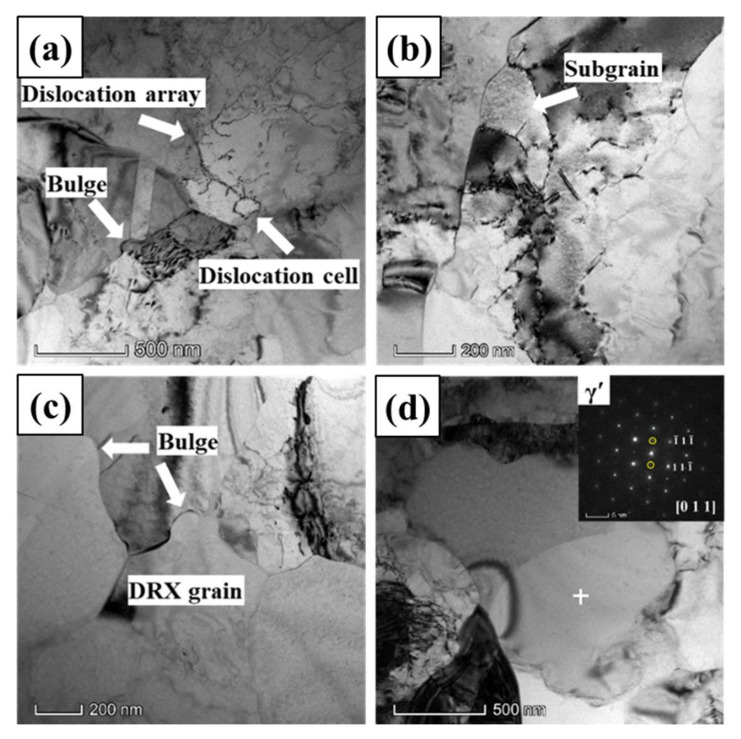
4.2 再看亚晶与低角度晶界
如果显微组织中出现大量:
- 位错胞;
- 亚晶;
- LAGB(低角度晶界);
则说明 DRV 非常活跃。若这些低角度边界继续演化,可能进入 CDRX 路径。
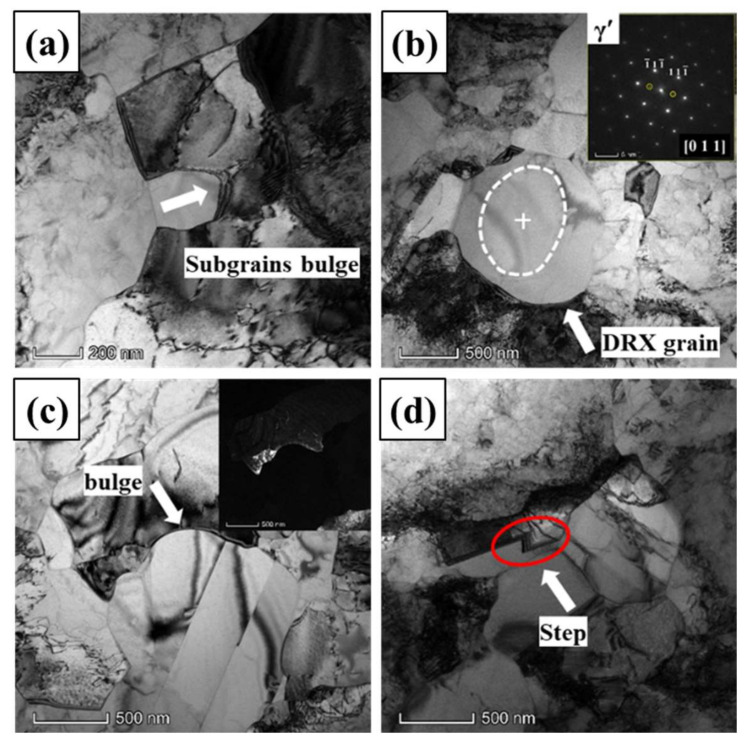
4.3 最后看晶界鼓出与新等轴晶
如果在原始晶界或三重点附近看到:
- 晶界局部弯曲、鼓出;
- 小尺寸、低畸变的新等轴晶粒;
则强烈提示 DDRX 正在发生。
因此,一个很实用的判断逻辑是:
高 KAM / 高位错 → DRX 有潜力;大量亚晶 / LAGB → DRV 强;晶界鼓出 + 新等轴晶 → DDRX 明显;LAGB 向 HAGB 连续转化 → CDRX 活跃。
Ti-55511 双阶段热变形研究表明,其显微组织中可以同时观察到晶界鼓出与亚晶演化痕迹,但综合分析后认为主导形核机制仍以 DDRX 为主[^he2021]。这也说明:单看一个特征不够,必须把 KAM、晶界类型和新晶粒位置一起看。
5. DRV 与 DRX 不是二选一,而是竞争关系
在热变形中,DRV 和 DRX 并不是简单地“谁有、谁没有”,而更像是在竞争同一个能量来源:
- DRV 会提前消耗位错储能;
- DRX 则需要足够的储能积累到临界条件后才能被触发。
于是就出现一种很典型的竞争关系:
- 如果温度很高、时间很充足、位错更容易攀移和湮灭,DRV 会更强;
- 一旦储存能被回复过程提前消耗掉,DRX 的临界条件就更难达到;
- 反过来,如果材料在一定应变和应变速率下快速积累较高位错密度,DRX 就更容易启动。
Ti-55511 的两道次热压缩结果很有代表性:随着第一道次温度提高,主导恢复机制由 DRX 转向 DRV[^wang2021]。这说明:
“温度更高”并不总是意味着“再结晶更多”。
因为高温一方面提高晶界迁移能力,有利于再结晶;另一方面也增强位错攀移和湮灭,使 DRV 更强。究竟哪一方占上风,要看材料体系、相区、应变速率和应变水平共同决定。
6. 钛合金中的 DRV / DRX:为什么相区这么关键?
钛合金和很多普通 FCC 金属不同,它的热变形行为强烈依赖于 α / β 相组成。因此讨论钛合金的 DRV / DRX,不能脱离相区。
6.1 β 单相区:晶内 DRV 常更强,晶界可见 DDRX
对近 β 钛合金或 β 区热加工而言,文献普遍指出:
- β 晶内更容易发生动态回复;
- 晶界附近可见不连续动态再结晶;
- 合适的低应变速率和高温条件有利于再结晶发展,但过高温度也可能使 DRV 过强[^furuhara2007][^wang2021]。
这意味着在 β 单相区,你经常看到的是:
“晶内 DRV + 晶界局部 DDRX”并存。
6.2 α + β 两相区:机制更复杂
在 α + β 两相区,情况会变得更复杂,因为:
- 晶界 α 可能钉扎晶界,抑制部分晶界迁移;
- β 基体中可能出现 CDRX 或局部 DRX;
- 若起始组织是层片状 α,则还可能发生 α 片层球化(globularization);
- 因而“回复—再结晶—球化”往往是协同演化的,而不是单一机制。
Ti-6Al-4V 等层片组织钛合金在热变形中常出现 α 球化与再结晶协同演化;而 Ti-55511 在 α+β 区的研究也表明,动态球化与再结晶会共同影响软化行为和最终组织[^lin2020]。
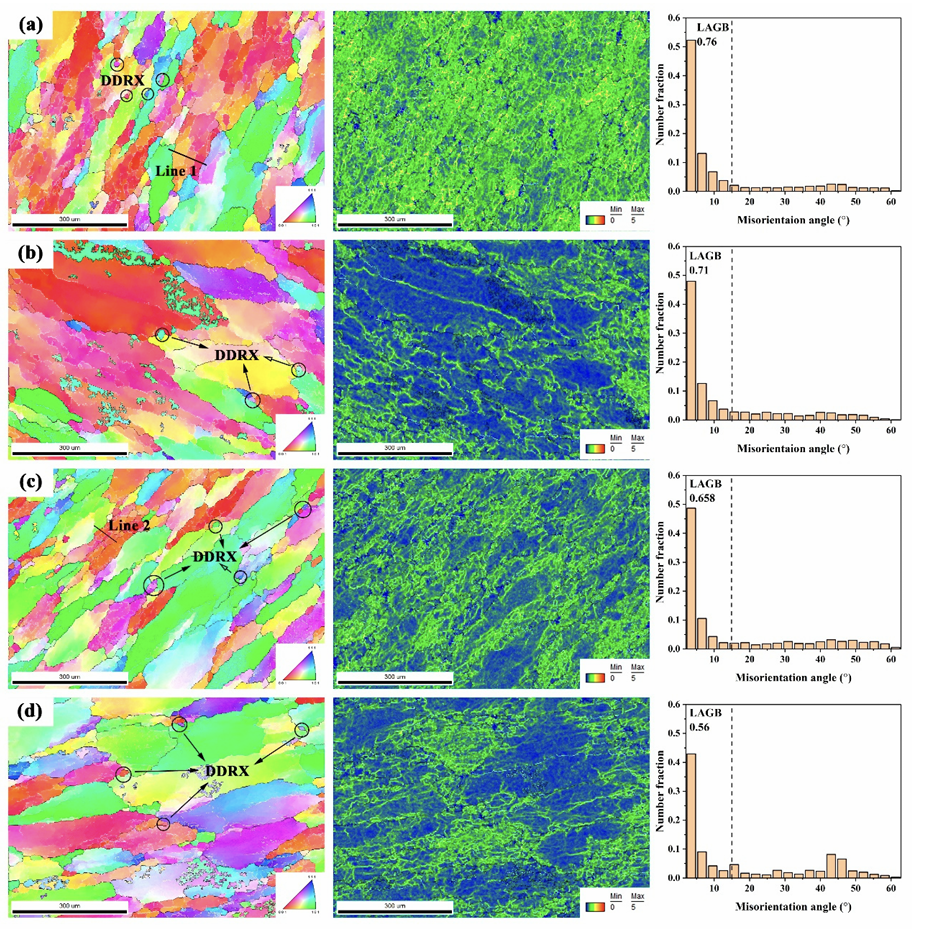
图3说明:
- 不同温度下 DRV / DRX 的变化
- EBSD和KAM图谱:(a) 700℃、(b) 750℃、(c) 800℃、(d) 850℃
7. DRV / DRX 在等温锻造中到底贡献了什么?
7.1 为什么等温锻造特别依赖组织演化控制?
等温锻造(isothermal forging)的特点是:
- 模具温度较高;
- 坯料温度较高;
- 变形过程中温降更小;
- 应变速率往往相对较低;
- 塑性流动更稳定。
这类工艺非常适合钛合金、镍基超合金等难变形材料。2025 年关于高性能钛合金等温近净成形的综述指出,等温锻造能够缓解传统锻造中因变形死区造成的组织不均,从而改善组织和性能的一致性[^chu2025]。2011 年关于钛合金复杂承力结构件等温近净成形的论文则指出,该技术能够获得更细小、均匀的组织,同时提高材料利用率并降低制造成本[^guo2011]。
7.2 DRV 的贡献:让材料“更好锻”
DRV 在等温锻造中的主要工程贡献包括:
(1)降低流动应力与成形载荷
通过位错重排和湮灭,DRV 可以降低加工硬化速度,使流动应力更平稳。这对于:
- 大投影面积件;
- 薄壁件;
- 高温高强材料;
- 长行程复杂成形;
尤其重要,因为它能直接降低模具负荷与设备负担。
(2)缓解局部失稳与早期开裂
局部高位错区如果能通过回复持续释放储存能,就不容易在早期因硬化过度而形成严重应变集中,因此对成形稳定性有积极作用。
(3)为 CDRX 提供前体亚结构
如果后续应变进一步累积,DRV 形成的亚晶和 LAGB 还可能继续演化成 CDRX。因此在很多情况下,DRV 不是 DRX 的对立面,而是其前奏。
7.3 DRX 的贡献:让组织“更好”
DRX 在等温锻造中的作用更加直接:
(1)晶粒细化
这是最经典、也是最重要的贡献。再结晶形成的新晶粒位错密度低、尺寸更细小,有利于获得更好的强塑性匹配和更均匀的后续热处理响应。
(2)组织均匀化
对于形状复杂、局部应变差异较大的锻件,DRX 可以帮助“重置”那些高畸变区域,从而减轻不同区域之间的组织差异。
(3)提高热加工塑性
当高储能区域被再结晶转化为低位错新晶粒后,材料后续继续变形时通常更不容易发生损伤累积和局部失稳。
8. 镍基超合金中的 DRX:为什么它尤其关键?
与钛合金相比,镍基超合金往往具有:
- 更高的高温强度;
- 更复杂的析出相强化;
- 更高的变形抗力;
- 更强的组织敏感性。
因此在超合金热锻中,DRX 往往是组织重建与细化的核心机制。
8.1 GH4151:DDRX 主导,CDRX 与 HDRX 共存
GH4151 的研究指出,其在亚固溶温度热变形中:
- 常规机制包括 DDRX 与 CDRX;
- DDRX 为主导机制;
- 同时观察到一种由粗大初生 γ′ 参与的 HDRX(heteroepitaxial dynamic recrystallization)[^lv2020]。
这说明在析出强化型超合金中,再结晶并不只是简单的“晶界鼓出”,第二相颗粒也可能参与异质形核或影响晶界迁移。
8.2 Haynes 282:不仅要看 DRX,还要看 mDRX
Haynes 282 的研究显示,在热压缩后短时间保温(up to 120 s)阶段,亚动态再结晶(mDRX) 可以主导组织继续演化[^eriksson2023]。这对工业锻造非常重要,因为实际生产里通常存在:
- 多道次锻造;
- 道次间停留;
- 模具保温;
- 缓慢冷却或短暂停留。
于是最终组织不只取决于“变形瞬间”,还取决于:
变形 + 停留 + 冷却全过程。
这也是为什么在超合金等温锻造中,工艺设计往往必须同时考虑:
- 变形温度;
- 应变速率;
- 单道次应变;
- 道次间停留时间;
- 保温与冷却策略。
9. 工程上怎么用 DRV / DRX 去反推工艺窗口?
如果把前面的内容落到工艺设计上,可以得到很实用的判断逻辑。
9.1 当 DRV 过强时
可能出现的表现:
- 应力曲线峰值后软化不明显,更多是平台化;
- 晶内亚结构多,但新等轴晶比例不高;
- 虽然变形相对稳定,但晶粒细化不足;
- 最终组织可能偏粗,后续性能改善有限。
这类情况常见于:
- 温度偏高;
- 应变速率过低;
- 单道次应变不足;
- 停留时间过长。
9.2 当 DRX 充分但不过度时
这通常是较理想的状态:
- 流动应力峰后适度下降;
- 有较高比例细小等轴晶;
- 组织均匀,局部高畸变区被有效“重置”;
- 载荷、塑性与最终组织达到较好平衡。
9.3 当 DRX / mDRX 过度时
也并不一定是好事,可能带来:
- 晶粒异常长大;
- 组织粗化;
- 某些区域因停留过久而过度再结晶;
- 性能离散性增大。
因此,真正理想的目标不是“DRX 越多越好”,而是:
让 DRV 和 DRX 以合适比例配合,在成形稳定性与组织细化之间取得平衡。
10. 结语
如果只用一句话概括:
DRV 决定材料在热变形时“能否更平稳地继续流动”,DRX 决定材料在热变形后“能否获得真正更优的组织”。
对于钛合金和超合金等温锻造而言,这两者并不是非此即彼,而是一个连续的、竞争又协同的动态过程。真正高水平的工艺设计,核心不是单纯追求更高温度或更低速度,而是通过温度、应变速率、应变量和停留时间的组合,让 DRV 与 DRX 发生在正确的程度、正确的位置、正确的时刻。
参考文献
[^furuhara2007]: Furuhara, T., et al. Dynamic Recrystallization in Titanium Alloys during Hot Deformation. Proceedings of the 11th World Conference on Titanium, 2007. 可参考公开会议文档:https://cdn.ymaws.com/titanium.org/resource/resmgr/ZZ-WCTP2007-VOL2/2007_Vol_2_Pres_15.pdf
[^wang2021]: Wang, H., Guo, J., Zhou, K., Zhang, X., Chen, C. Investigation of the Dynamic Recovery and Recrystallization of Near-β Titanium Alloy Ti-55511 during Two-Pass Hot Compression. Metals 2021, 11(2), 359. DOI: https://doi.org/10.3390/met11020359
[^he2021]: He, C., et al. Microstructural Variation and a Physical Mechanism Model for a Ti-55511 Alloy during Double-Stage Hot Deformation with Stepped Strain Rates in the β Region. 2021. 文献信息可参考公开索引与全文镜像。
[^lin2020]: Lin, Y. C., et al. Spheroidization and Dynamic Recrystallization Mechanisms of a Ti-55511 Alloy during Hot Compression in the α + β Region. Materials Science and Engineering A 2020. 文献讨论了 Ti-55511 在 α+β 区球化与再结晶的协同演化。
[^lv2020]: Lv, S., Chen, X., et al. Investigation on Sub-Solvus Recrystallization Mechanisms in an Advanced γ-γ′ Nickel-Based Superalloy GH4151. Materials 2020, 13(20), 4553. DOI: https://doi.org/10.3390/ma13204553
[^eriksson2023]: Eriksson, E., Hanning, F., Andersson, J., Colliander, M. H. Meta-Dynamic Recrystallization in the Ni-Based Superalloy Haynes 282. Metals 2023, 13(8), 1335. DOI: https://doi.org/10.3390/met13081335
[^chu2025]: Chu, S., Huang, W., Liang, G., Meng, Q., Zhou, X., Mao, B. Research Trends in Isothermal Near-Net-Shape Forming Process of High-Performance Titanium Alloys. Materials 2025, 18(3), 578. DOI: https://doi.org/10.3390/ma18030578
[^guo2011]: Guo, H., Yao, Z., Zhao, Z., Guo, Y., Tang, J., Li, Y. The Application of Isothermal Near Net-shape Forming Technology on Titanium Complicated Load-bearing Structures. Proceedings of the 12th World Conference on Titanium, 2011. 可参考公开会议文档:https://cdn.ymaws.com/titanium.org/resource/resmgr/ZZ_WTCP_2011_Re-Do/V3/2011_Vol.3-1-J-The_Applicati.pdf
